
Tech Blog
Search our Tech Blog:
Datasharing, Crowdsourcing and Community Contributions
“We know more about the surface of Mars than we do about the seafloor here on earth” is a rallying cry that has been heard across the marine world. Perhaps you are interested in a better understanding of our world and want to know if you might be able to help improve our knowledge. Crowdsourcing, data sharing, and citizen science initiatives are common terms, but understanding how you and your vessel can contribute to these efforts can be confusing. This tech blog is intended to clarify your options and explain how to get involved using an Argos forward looking sonar.
Sharing Across the Fleet
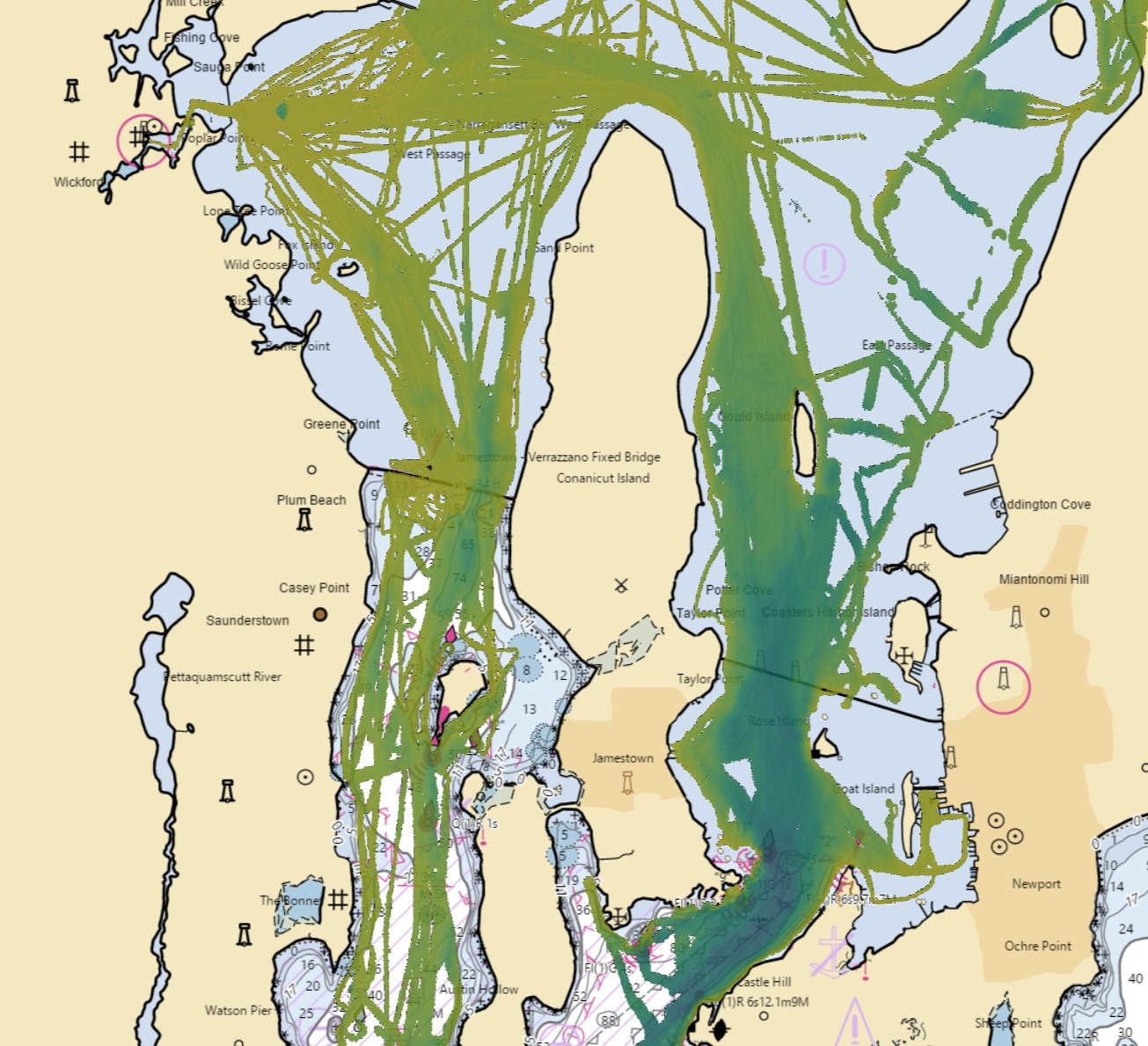
We are moving our Local History Map™ off the vessel to share across the FarSounder fleet and enabling our customers to contribute to global efforts to build a complete map of the sea floor across all the world’s oceans. Participants receive the benefit of backing up the Local History Map™ they collect in the cloud and have the satisfaction of knowing that contributions will benefit the community and may be included in the Seabed 2030 initiative.

Chart Data Options for SonaSoft
The practice of using chart overlay greatly improves end user’s experiences. Chart overlay enables users to easily correlate in-water targets on the sonar's display to the locations of potential navigation obstacles. It also allows users the ability to have high confidence in their charts by confirming that bathymetric features line up with the sonar. That is why FarSounder’s team works hard to make it easy for end users to add charts to the FarSounder systems. One way to encourage chart use is to make sure FarSounder software supports importing S-57 and S-63 charts in SonaSoft as part of the base software.
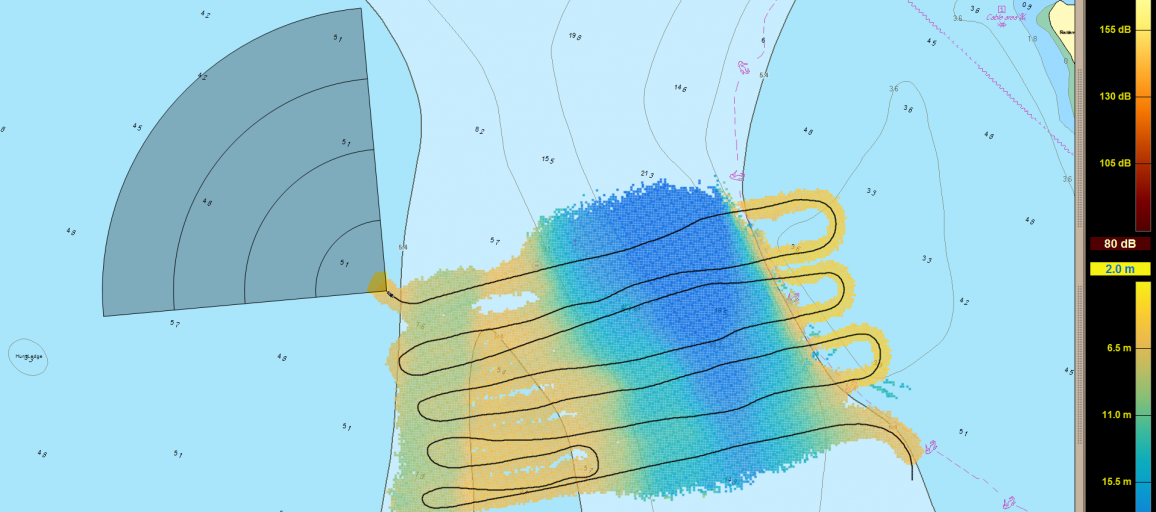
What is Local History Mapping™?
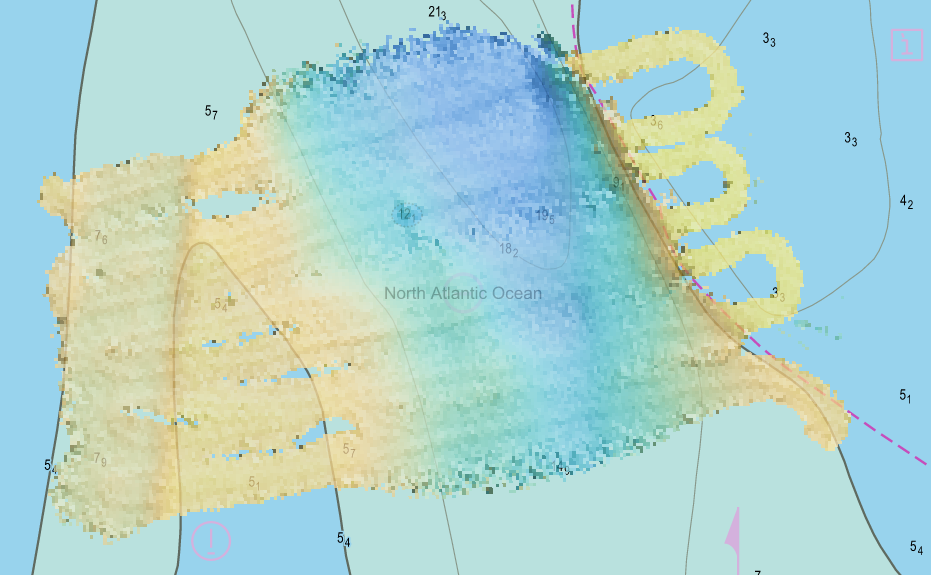
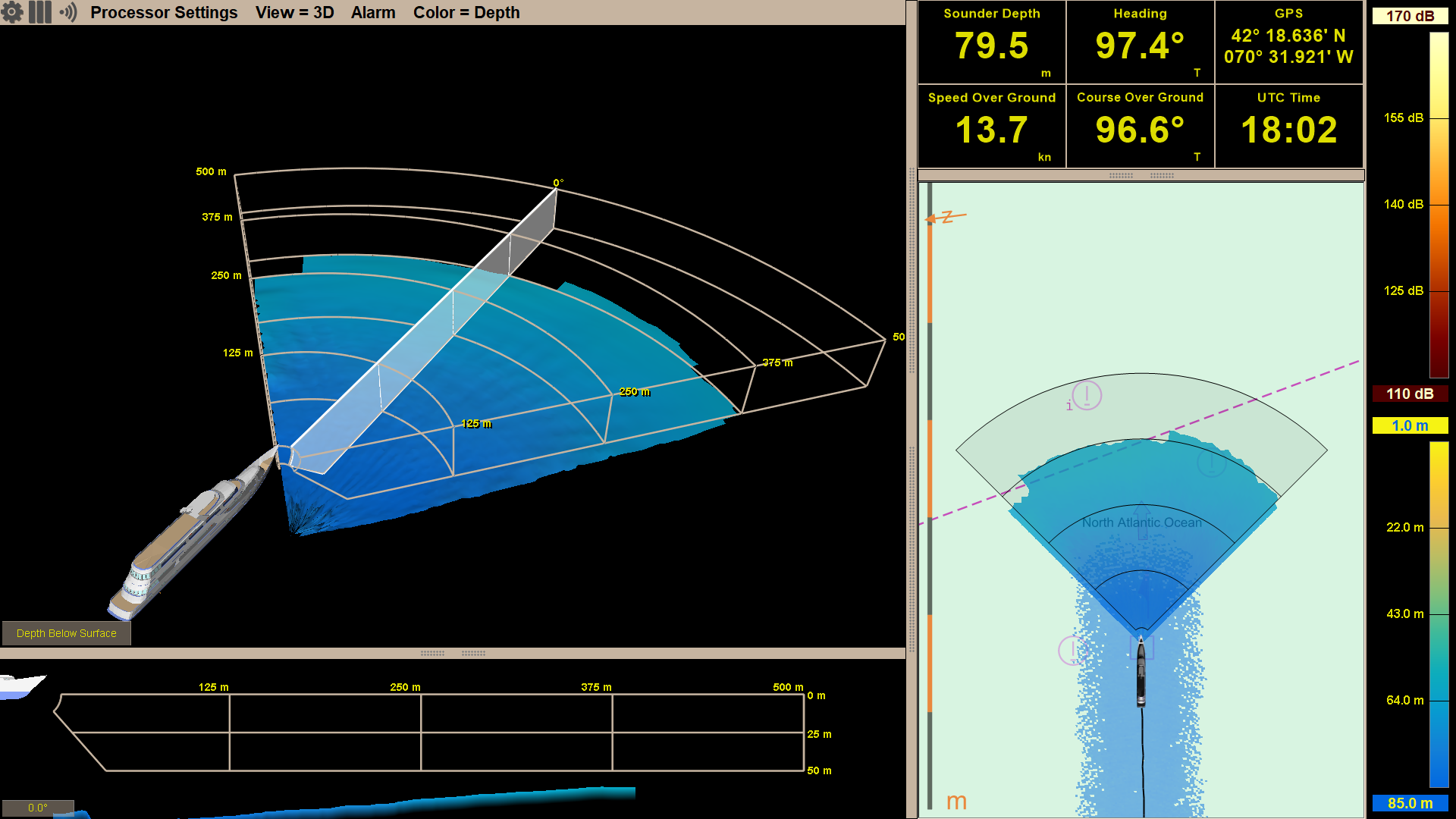
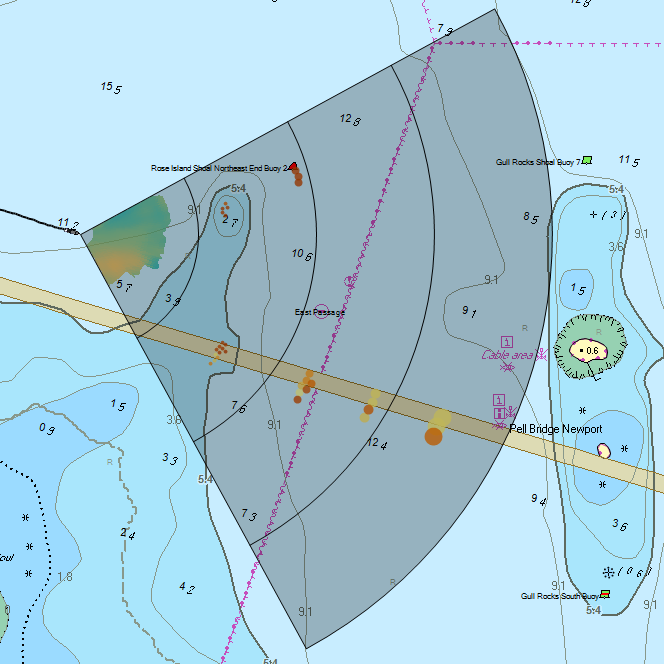
All Argos sonar systems use FarSounder’s SonaSoft™ processing software for processing and display. Real-time sonar data is displayed via a 3D representation in the 3D Viewer and also in a “top down” representation overlaid on an ENC chart. In addition to detecting the seafloor ahead of the vessel and navigation hazards in front of the vessel in real-time, a history of bathymetric data is stored as the vessel moves along its route. This data is an average of the seafloor detections over all of the pings that contained this area. It is most commonly displayed with color mapped to depth. Essentially, a map of the seafloor is created from the vessel’s recent history and displayed for operator use.
Shallow and Deep Water Bottom Mapping Capabilities
FarSounder Argos 3D forward looking navigation sonars look for both the seafloor and potential navigation hazards anywhere in the water column ahead of the vessel. Hazards in the water column are detected as in-water targets and can be detected out to full range of the sonar (dependent upon target size). While the maximum in-water target detection range is a set distance for each product, maximum bottom detection range is not. The maximum bottom detection range, or bottom mapping range is dependent on the depth of water below the transducer module, not the Argos model.
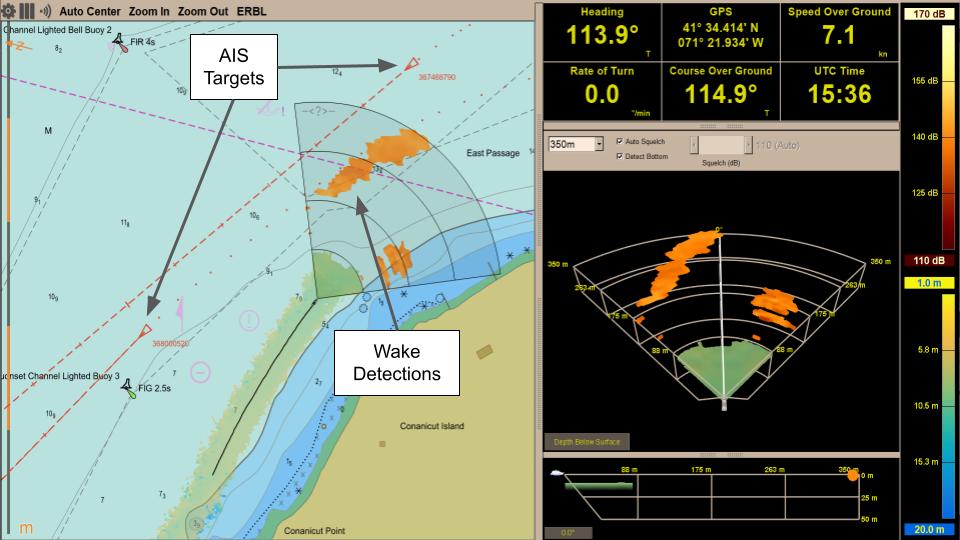
AIS and ARPA Overlays: Adding Situational Awareness to Sonar Data
In recent updates, FarSounder added support for displaying AIS (Automatic Identification System) targets and ARPA (Automatic Radar Plotting Aid) targets in the Chart Overlay display in SonaSoft™ – the sonar processing and display software for Argos navigation sonars. These features raise situational awareness for the vessel operator and add to the utility of the system, here’s how!
Heightened Awareness in Short Range Modes
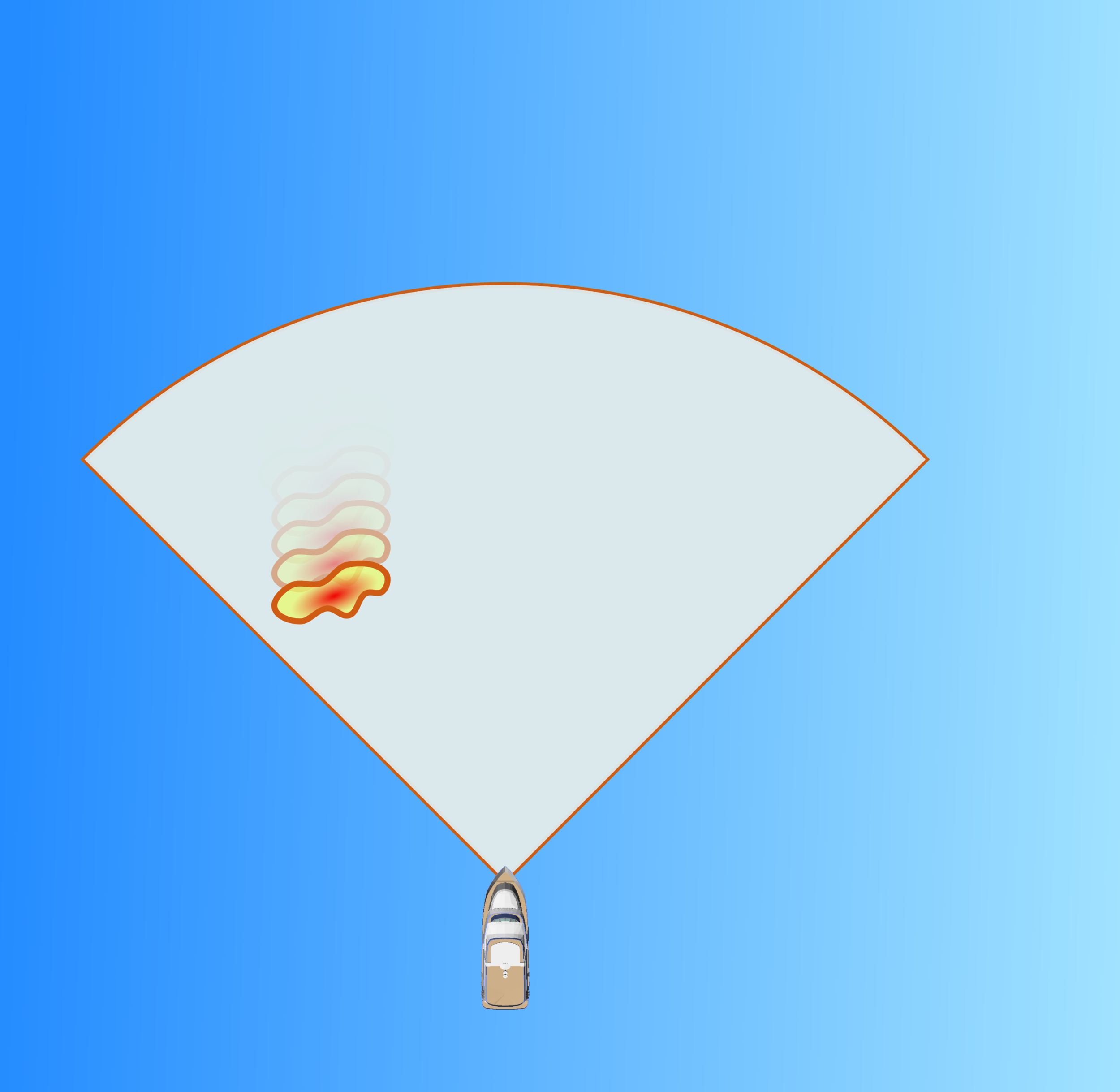
Did you know the Argos sonar systems offer dynamic fields of view? This gives the user different range options to choose from based on the marine environment and use case. In order to get the best sonar performance and most accurate detections, the operator is able to alter the mode accordingly. When transiting at significant speeds, operators will most likely want to use the longest range mode, giving them the most reaction time to any navigation hazards. While maneuvering through coral heads or looking for anchorage spots and traveling slower, users will many times prefer to be using a short range mode.
Hotkey Support for Custom Controls, Foil Panels, and Touch Screens
Integration flexibility is one of the key aspects to FarSounder’s software. Since SonaSoft 3.0, all end user features can be controlled with only a 2 button mouse/trackball and the design of the user interface facilitates the use of touch screen monitors. We also offer low level integration via a network based SDK.
Local History Mapping™ with Forward Looking Sonar
To date, FarSounder’s 3D FLS products have operated purely as real time navigation and obstacle avoidance sonars. Our user interface software includes an overlay of the real time sonar imagery on top of a standard nautical chart. However, since the early days of our development, we have always believed that storing the sonar data and building a bathymetric history would be a valuable capability. Some years ago, we started developing our first Forward Looking Multibeam (FLMB) proof-of-concept. Today we are excited to announce that starting with SonaSoft 3.3, Local History Mapping™ will be included as a standard feature.
What to Expect From Your 3D Forward Looking Sonar
FarSounder forward looking navigation sonars are unlike any other sonar on the market. Our sonars generate a complete 3D image ahead of the vessel at navigationally significant ranges with each and every ping. Because our technology differs from all other sonar products, we try to be very straightforward and clear about what our products can and cannot do. The purpose of this posting is to highlight the unique capabilities that users can expect from our navigation products as well as outline the general installation and interfacing requirements.
Introducing True Target Motion™ for 3D Navigation Sonar
Improving the situational awareness of obstacles below the sea surface is the reason we developed our 3D forward looking sonars. True Target Motion™ is our latest innovation for improving upon that awareness. This new software feature combines inputs from the ship’s heading and GPS sensors with our navigation sonar data to animate the movement of detected sonar targets relative to the vessel between each ping. Without True Target Motion™ the position of each sonar target can only be updated once every ping. Now, target positions are updated as the vessel moves between pings.
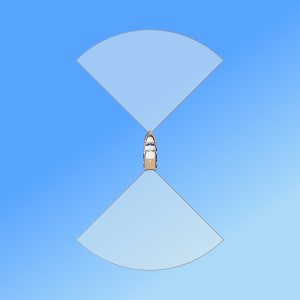
Eyes in the Back of Your Head - Introducing Dual Navigation Sonar
Forward looking sonars significantly add to a ship's situational awareness when moving forward. But what about when the vessel is moving astern? With more and more yachts, workboats, expedition class passenger vessels, and arctic explorers being outfit with azimuth thrusters and advanced DP, larger vessels are finding their way into tight places with a need to back up. If you need an obstacle avoidance sonar to make your way in, sometimes you need one to make your way out - especially with the reduced situational awareness of the bridge facing forward and the vessel running astern.
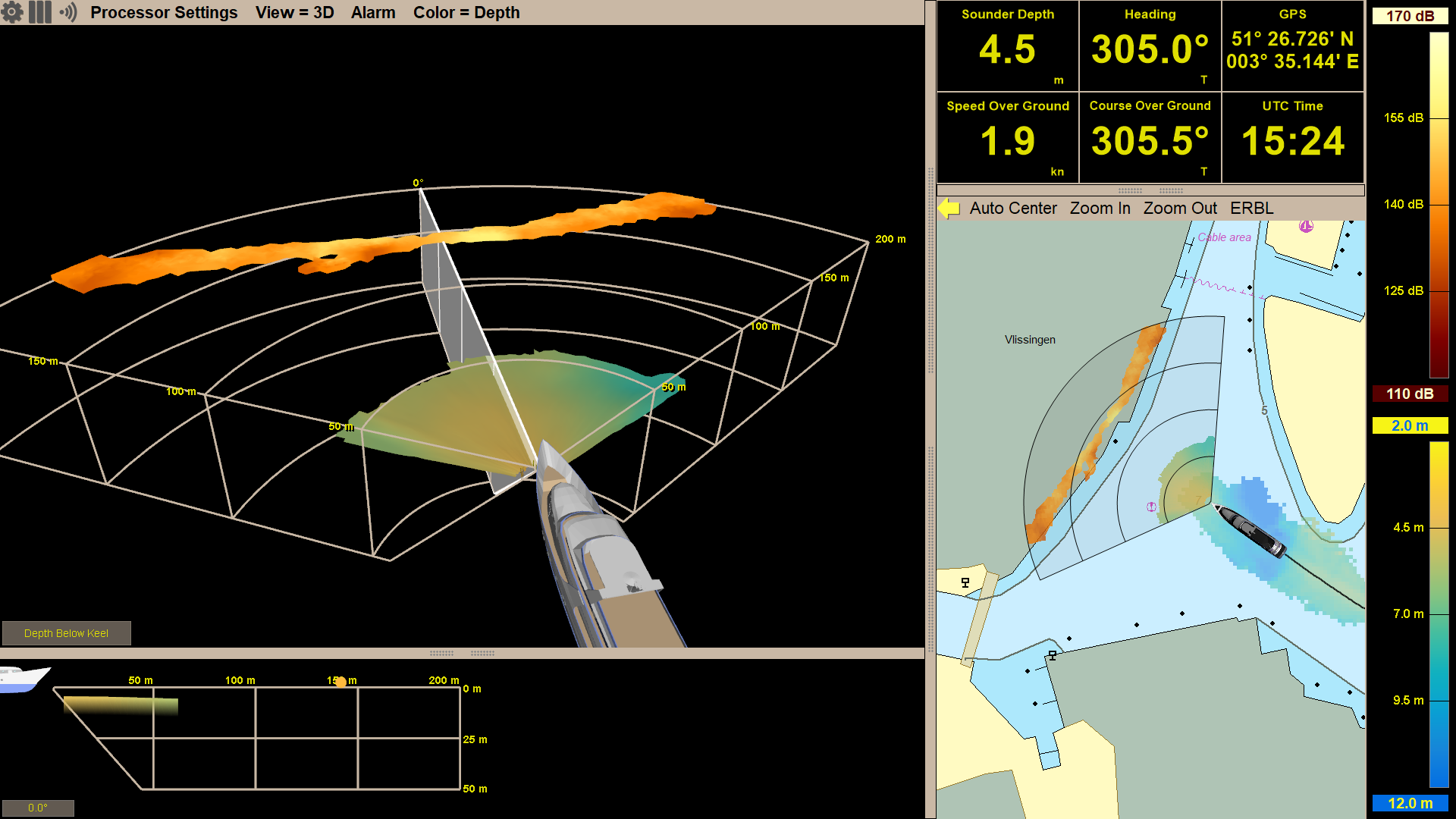
Seeing the Big Picture: Expanded Chart Overlay
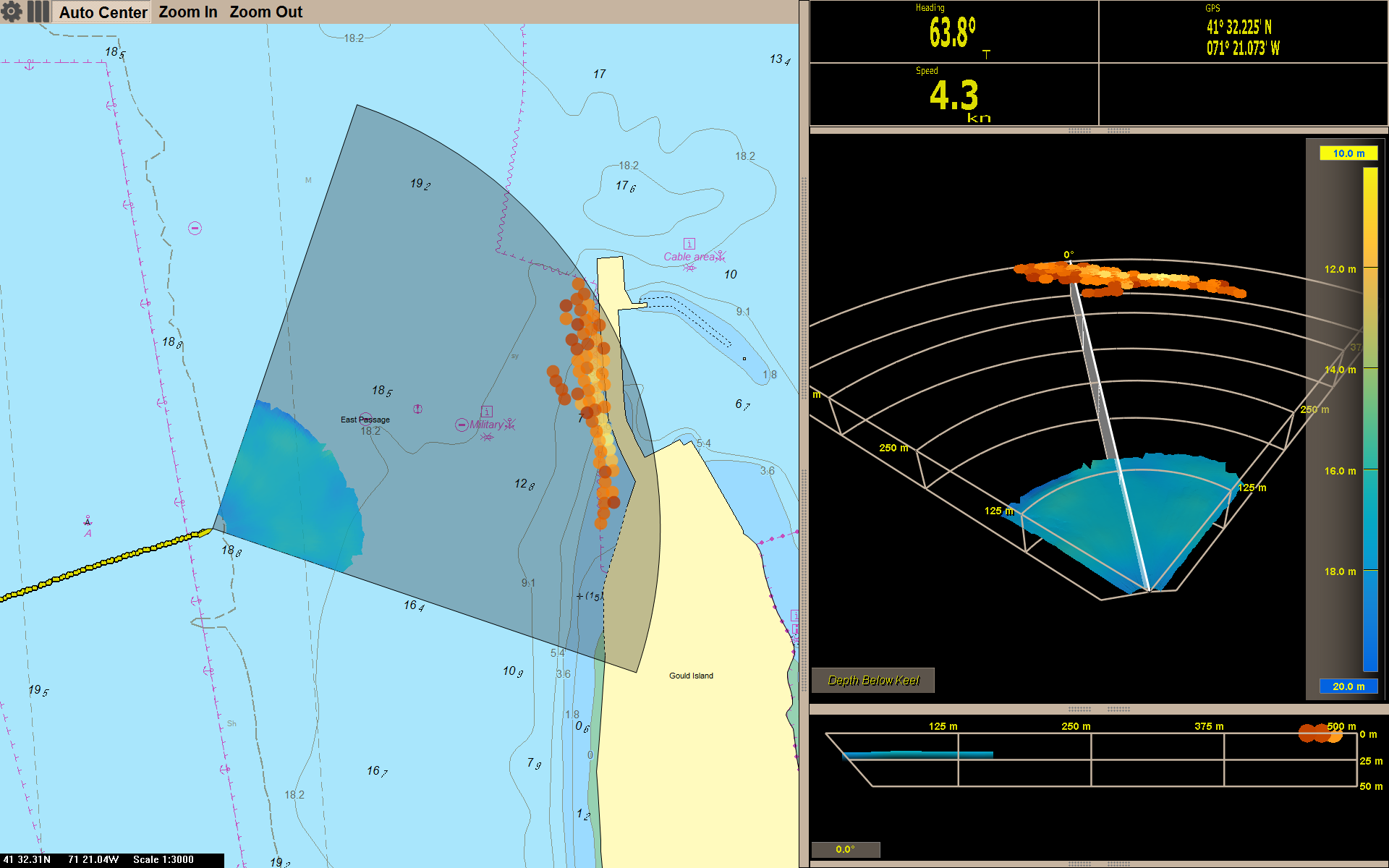
Early in FarSounder’s development, we added a raster chart display to help our engineers correlate what we saw in the sonar display with what was in the real world. The raster chart display evolved to a vector chart display. Soon after that, we started displaying in-water targets on top of the chart. Now, with the release of SonaSoft 3.0, our software includes an expanded overlay with the complete 3D sonar image. The seafloor and in-water targets are shown with the same colors as the 3D Sonar Display as an overlay on top of the chart data. Many users will find that the Chart Display will become their primary display rather than the 3D Sonar Display since it shows a more complete situational awareness with both chart and sonar data.
The 3D FLS Operator Experience: Making a Good Sonar Great
FarSounder's engineers spend a lot of their time working with customers to understand their navigation sonar needs. We strive to design our 3D FLS products with a good balance of performance metrics. However, our systems are more than just hardware. The software display is an important component too and as the saying goes, "a picture is worth a thousand words". That's why we've invested heavily in our operator interface, making a system that is easy to operate and easy to understand. Let's take a closer look at some of these features.

Comparing Forward Looking Sonars for Navigation
As with many technical products, understanding the differences between navigation sonar products sold by different vendors can be confusing. Much of the technical product literature can be confusing with different companies assigning different meanings to similar terms. At trade shows, we are often asked "What's the difference between Company X's product and yours?" or "Which is a better? FarSounder's sonars or Company B's sonars?". We don't like to presume we know every detail about every sonar on the market. Rather, we believe that once a customer understands which metrics they should be considering they can easily choose the best "look ahead sonar" for them. For our customers' class of ships, we're confident that they will choose a FarSounder. In this blog posting, we'll take a look at what we feel are the most important metrics you should use to compare forward looking sonars: Coverage Zone and Update Rate.
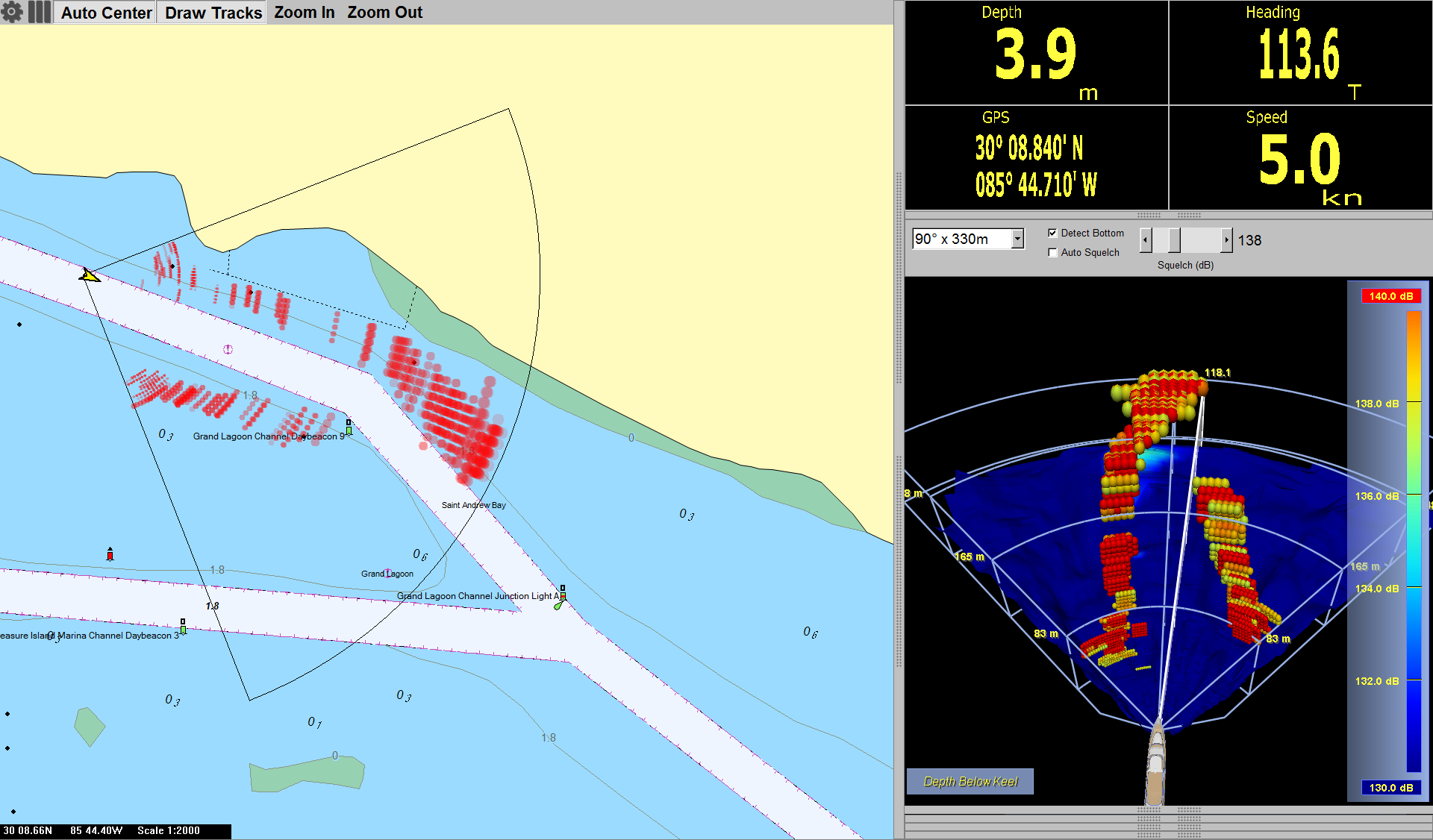
Chart Overlay Makes Collision Avoidance Easier
When looking at our software's 3D Sonar display it is sometimes difficult to correlate what we see on the screen to what we see (or don't see) out the bridge window. However, many users are used to correlating what they see on a radar display, especially if they have a radar overlay on top of electronic nautical charts. In our continuing efforts to improve user experience, we've recently added chart overlay of in-water sonar targets to our software. This enables users to more quickly and easily make the jump from what they see on the sonar's display to where potential navigation obstacles are located.
In-Water Target Stabilization: Showing Exactly What You Need to See
Due to natural variations in fluid characteristics (such as water temperature, salinity and density) and the presence of small in-water reflectors (such as moving currents, marine life, and bubbles), the underwater environment is acoustically dynamic and often unpredictable. That’s why we at FarSounder have committed ourselves to building incrementally smarter tools to help keep our customers on the edge of technology and as far from harm’s way as possible. As a result, we’re happy to give a sneak peek of our most intelligent underwater collision avoidance system yet, capable of stabilizing in-water targets detected by the sonar and providing you with the most accurate representation of the water in front of your vessel to date. Our new stabilization feature relies on tracking in-water targets detected across multiple transmit/receive cycles (i.e. “pings”). By grouping these detections and monitoring their movements over time, we can use that information to both filter out unreliable targets, and fill in gaps where we are confident targets should be seen.