
Tech Blog
Search our Tech Blog:
Sharing Across the Fleet
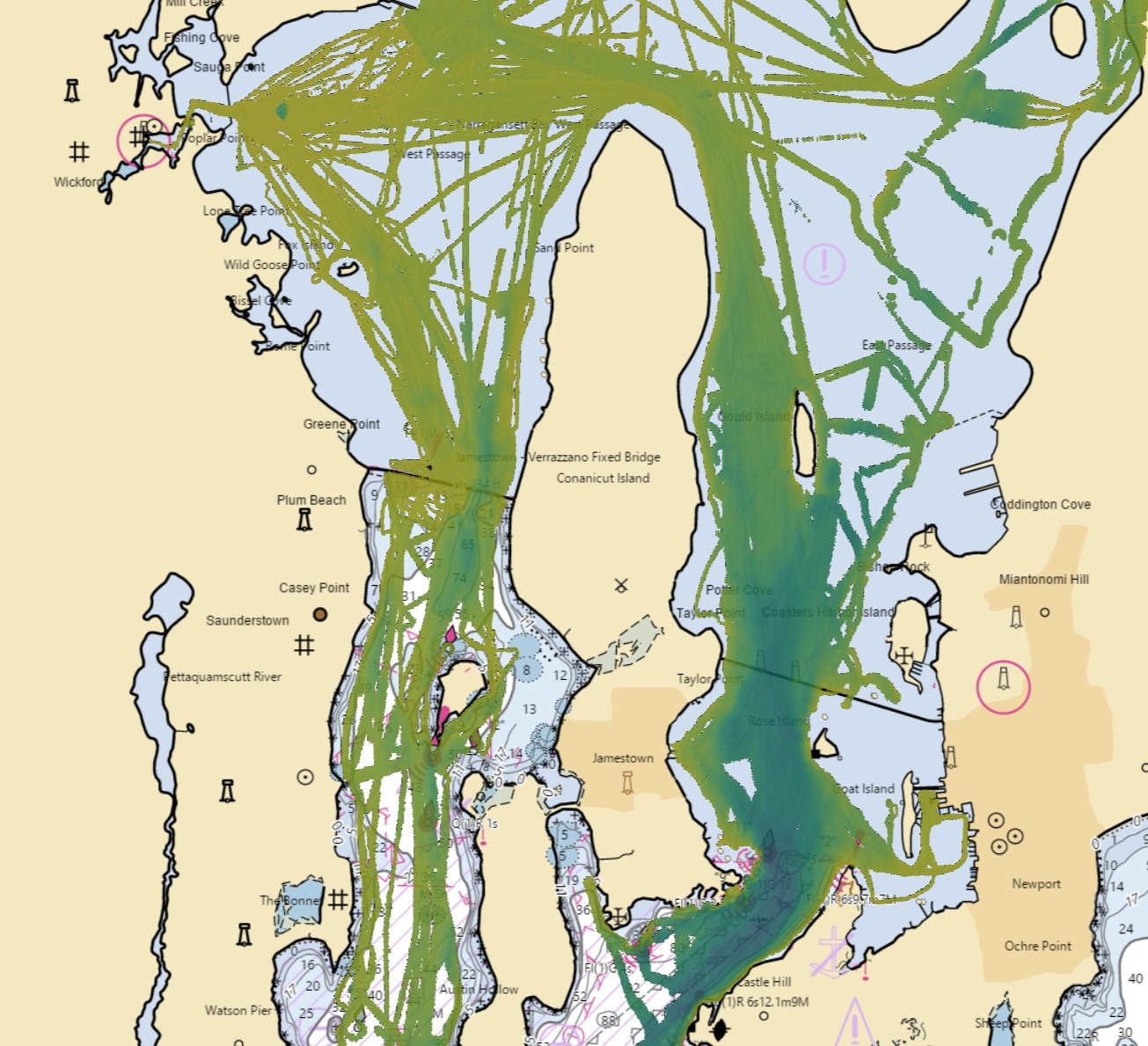
We are moving our Local History Map™ off the vessel to share across the FarSounder fleet and enabling our customers to contribute to global efforts to build a complete map of the sea floor across all the world’s oceans. Participants receive the benefit of backing up the Local History Map™ they collect in the cloud and have the satisfaction of knowing that contributions will benefit the community and may be included in the Seabed 2030 initiative.
What is Local History Mapping™?
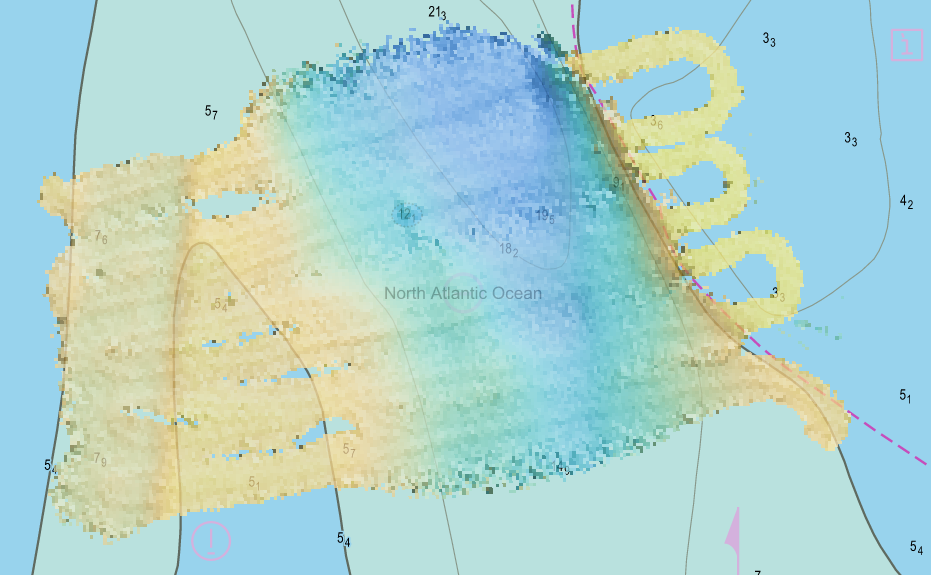
All Argos sonar systems use FarSounder’s SonaSoft™ processing software for processing and display. Real-time sonar data is displayed via a 3D representation in the 3D Viewer and also in a “top down” representation overlaid on an ENC chart. In addition to detecting the seafloor ahead of the vessel and navigation hazards in front of the vessel in real-time, a history of bathymetric data is stored as the vessel moves along its route. This data is an average of the seafloor detections over all of the pings that contained this area. It is most commonly displayed with color mapped to depth. Essentially, a map of the seafloor is created from the vessel’s recent history and displayed for operator use.
Introducing True Target Motion™ for 3D Navigation Sonar
Improving the situational awareness of obstacles below the sea surface is the reason we developed our 3D forward looking sonars. True Target Motion™ is our latest innovation for improving upon that awareness. This new software feature combines inputs from the ship’s heading and GPS sensors with our navigation sonar data to animate the movement of detected sonar targets relative to the vessel between each ping. Without True Target Motion™ the position of each sonar target can only be updated once every ping. Now, target positions are updated as the vessel moves between pings.
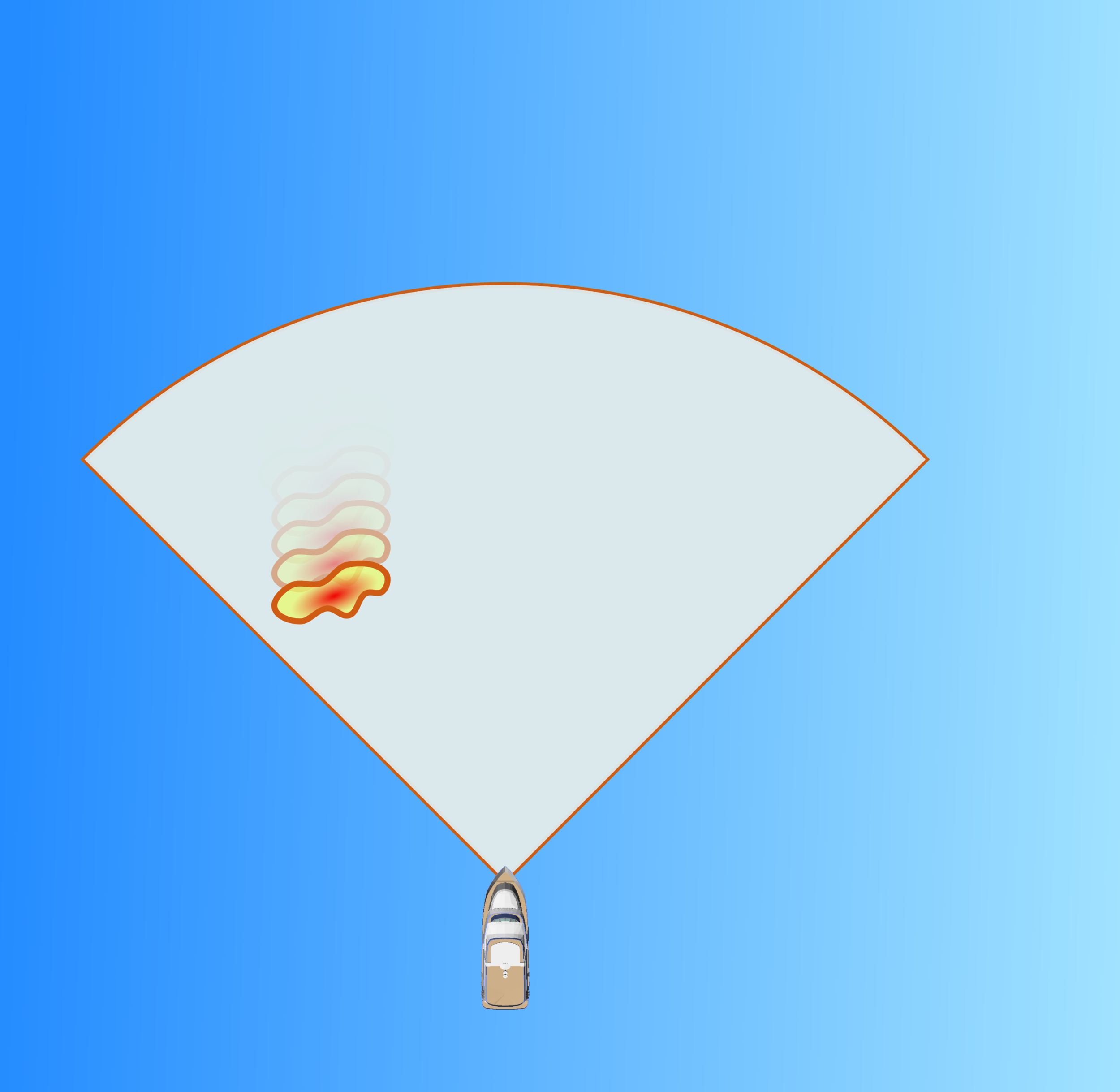
In-Water Target Stabilization: Showing Exactly What You Need to See
Due to natural variations in fluid characteristics (such as water temperature, salinity and density) and the presence of small in-water reflectors (such as moving currents, marine life, and bubbles), the underwater environment is acoustically dynamic and often unpredictable. That’s why we at FarSounder have committed ourselves to building incrementally smarter tools to help keep our customers on the edge of technology and as far from harm’s way as possible. As a result, we’re happy to give a sneak peek of our most intelligent underwater collision avoidance system yet, capable of stabilizing in-water targets detected by the sonar and providing you with the most accurate representation of the water in front of your vessel to date. Our new stabilization feature relies on tracking in-water targets detected across multiple transmit/receive cycles (i.e. “pings”). By grouping these detections and monitoring their movements over time, we can use that information to both filter out unreliable targets, and fill in gaps where we are confident targets should be seen.
Explaining the Water Depth Limit and Other Unexpected Reflections
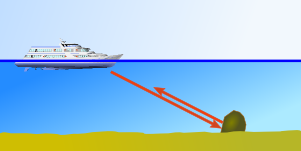
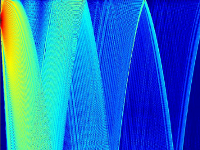
Not all forward looking sonars are created equal. Most only produce a view of a single 2 dimensional slice. Some use scanning technology to build an image from multiple pings. Few employ 3D technology. FarSounder sonars are the only look-ahead sonars which produce a true 3-dimensional image at navigationally significant ranges. They do this with a single ping enabling a fast update rate. Clearly, range is an important metric. However, one number alone cannot fully describe a sonar's range capabilities. A navigation sonar should specify its range not only in terms of maximum detection range for a given in-water target size, but also maximum range at which it can map the bottom. The first range metric is a number that is easy to specify given a target's reflectivity (e.g Target Strength) in a nominal marine environment. The second number is more difficult because it is not fixed. Rather, the bottom mapping range of a forward looking sonar is primarily a function of the water depth below the transducer. This blog posting explains what drives this limit and how these same concepts can explain other “unexpected” echo reflections.
DAMUS: FarSounder's Sonar Performance Prediction Tool
Given an echo returned from an environment within sonar's field of view, the ultimate goal of a FarSounder product is to decide whether the echo corresponds to a true target in the 3D space. The target could be the sea floor, an in-water obstacles, marine life, a diver, etc. This detection problem is fundamental to all of our products irrespective of their purpose: navigation or threat detection. FarSounder engineers have developed several tools that make their life easier when they need to unravel the complexity of underwater detection problems. One of the tools central to research and development at FarSounder is our sonar performance prediction tool, code named: DAMUS.
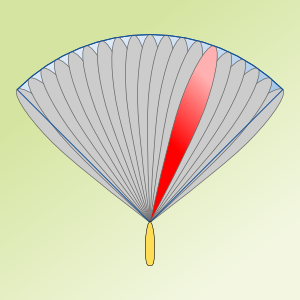
Advantages of Array Processing Over Scanning Sonar
When considering a sonar product for use in navigation, it is important to consider a number of parameters and system characteristics. Obviously, the ability to look ahead is important. However, "where", "how", and "when" the sonar looks ahead are characteristics that will determine if a particular sonar is suitable for navigation and practical obstacle avoidance. A sonar's overall system design impacts these characteristics significantly. Scanning sonars are one of the most common system designs for advanced sonar solutions as they are relatively inexpensive and relatively small. This makes them a good solution for many applications. Unfortunately, real-time navigation is not one of them. This blog post illustrates the advantage of phased array processing sonars over scanning sonars for navigation applications.