In-Water Target Stabilization: Showing Exactly What You Need to See
Figure 1: Ping to ping concept
Due to natural variations in fluid characteristics (such as water temperature, salinity and density) and the presence of small in-water reflectors (such as moving currents, marine life, and bubbles), the underwater environment is acoustically dynamic and often unpredictable. That’s why we at FarSounder have committed ourselves to building incrementally smarter tools to help keep our customers on the edge of technology and as far from harm’s way as possible. As a result, we’re happy to give a sneak peek of our most intelligent underwater collision avoidance system yet, capable of stabilizing in-water targets detected by the sonar and providing you with the most accurate representation of the water in front of your vessel to date. Our new stabilization feature relies on tracking in-water targets detected across multiple transmit/receive cycles (i.e. “pings”). By grouping these detections and monitoring their movements over time, we can use that information to both filter out unreliable targets, and fill in gaps where we are confident targets should be seen.
Target Tracking
As alluded to by our previous blog posting, automatic target tracking will be a major feature of our upcoming software release. Our new software works by clustering detection points, building tracks for those clusters over time using extracted and predicted cluster features, and determining a confidence rating for each track.
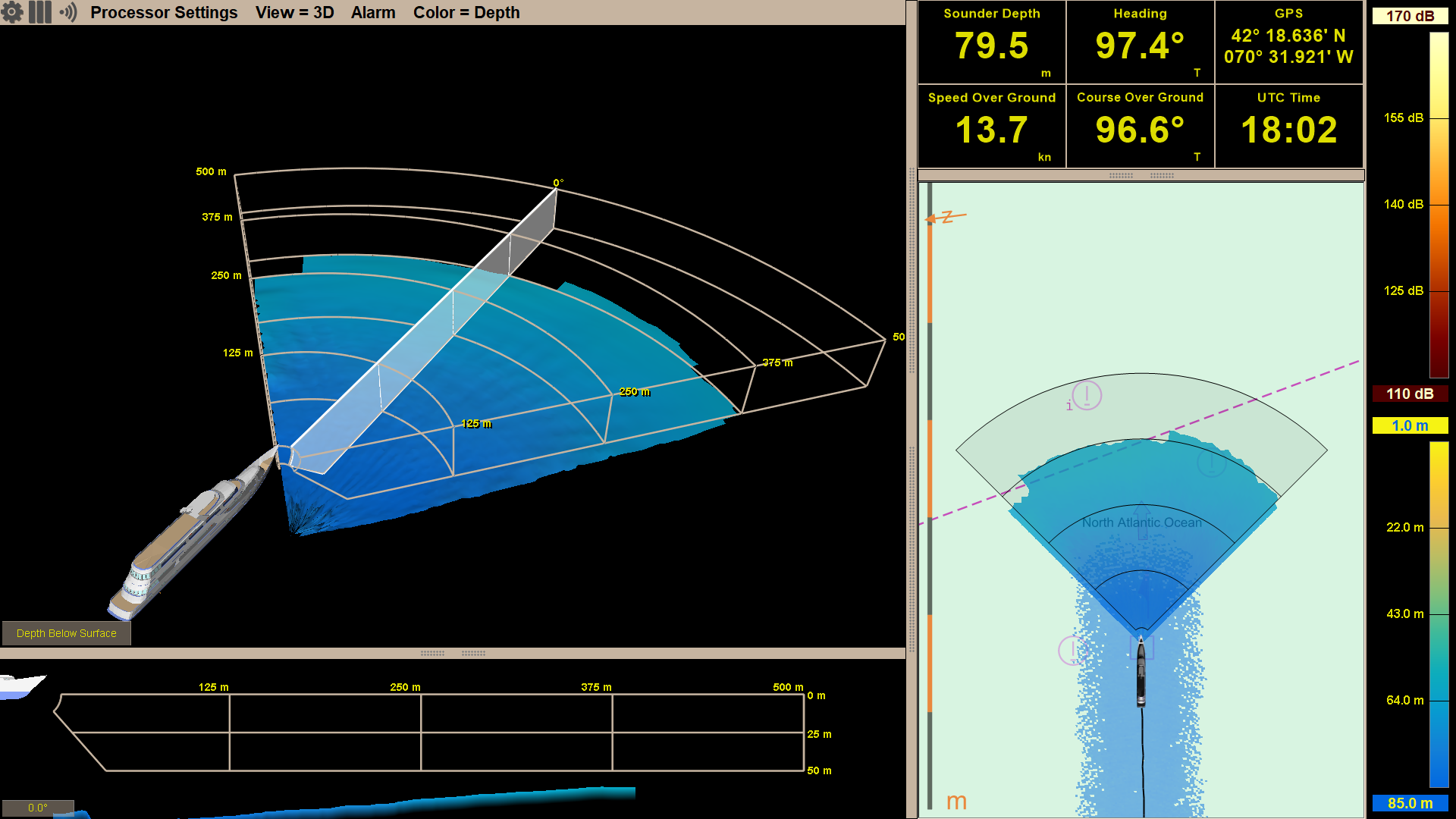
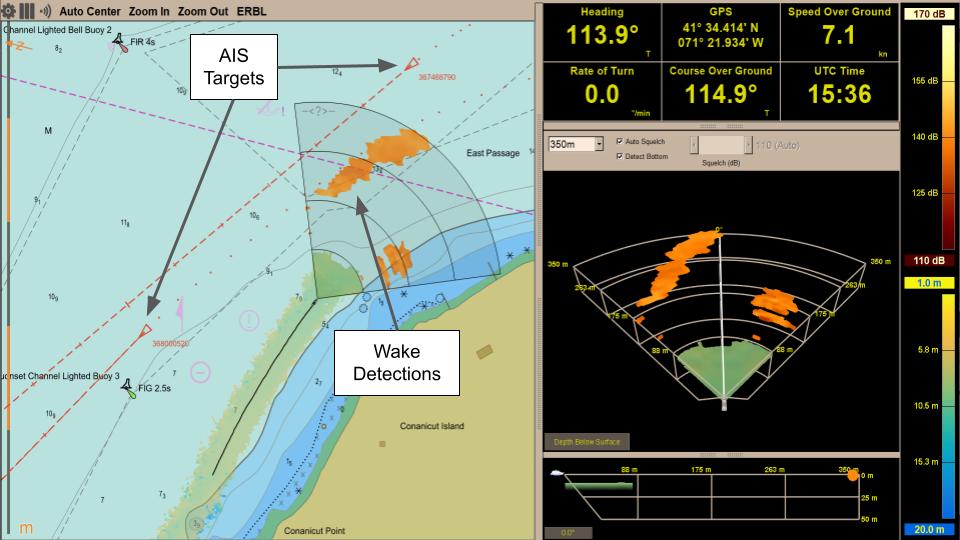
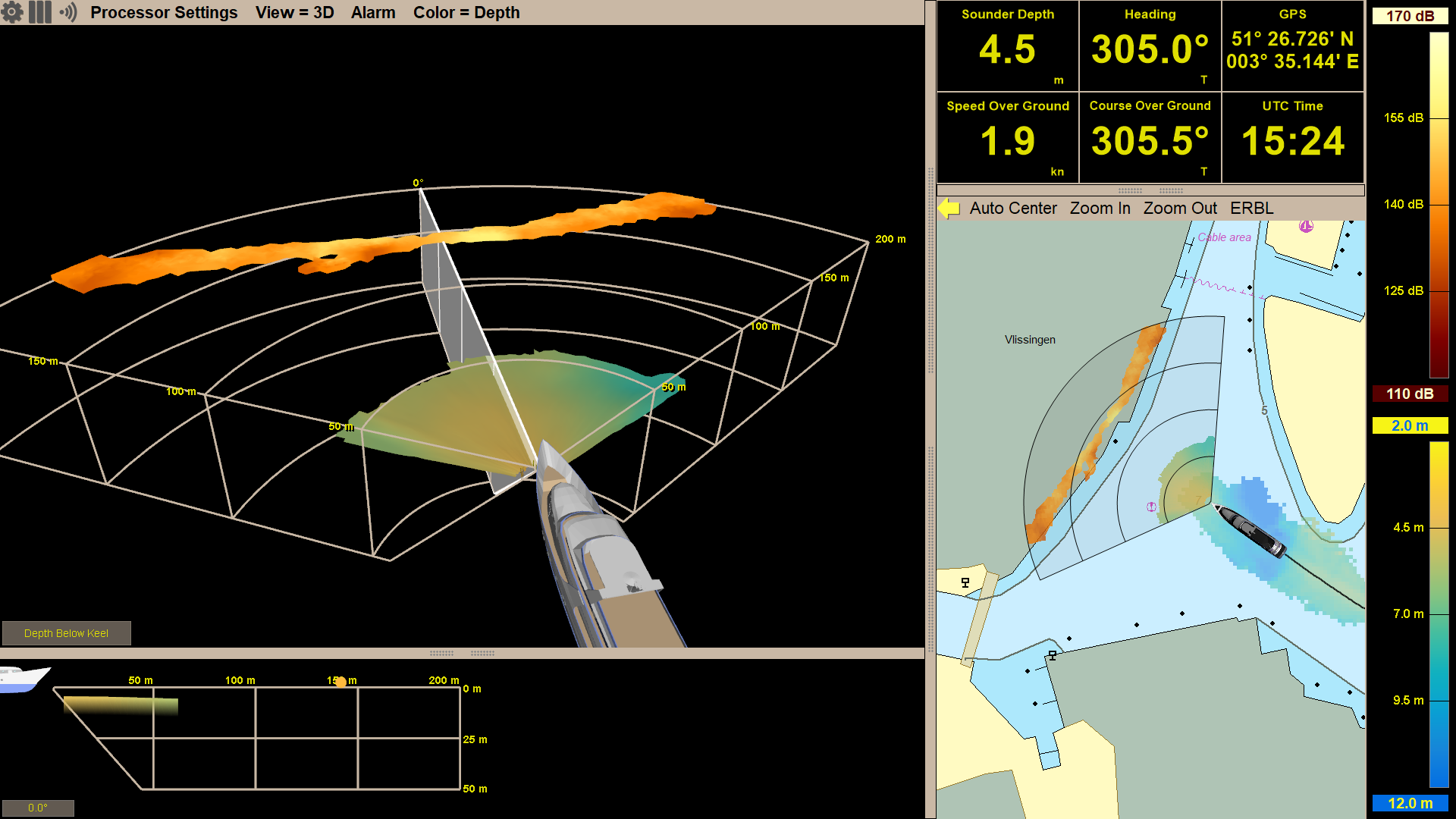
Figure 2: Tracking in-water target groups
In Figure 2, we show a 3D sonar image of the sea floor with two in-water targets. The target locations are shown as a group of red spheres. This is our standard display of in-water targets. Additionally, we show a series of yellow and pink dots behind each group of spheres. These dots represent the historical locations of the targets as the vessel was maneuvering toward them. Such track history information is not normally shown in our user display. However, in this case, we want to illustrate the track histories.
Notice that there are three tracks being built. The two tracks on the right are monitoring real targets that could be potential hazards to the vessel. The track all the way to the left, however, shows that the sonar is “watching” for a potential, but currently unreliable target. The target attached to the middle track is semi-transparent because it was not actually seen in that ping (more on this in “Gap Filling”).
To better understand how this works, the following video gives a top-down example of this new feature in action. In the video, you can see how the system keeps track of targets over time.
Temporal-Based Noise Filtering
Tracking these targets doesn’t mean distracting you with lines, though. Rather, it means having more information about what’s in front of the vessel. One of the major benefits of measuring track reliability is being able to hide targets that are most likely the result of noisy data. Sometimes a wave slap, engine noise, or fleeting bubble can create a signal that is mistaken for a possible in-water target. These are transient “noises” that should ideally be filtered from the user display. By hiding all targets that are part of a track with a low reliability rating, the number of false positives presented to the user can be dramatically reduced. This next video shows exactly that taking place in a particularly noisy environment.
Gap Filling
As described above, sometimes the signals detected by the sonar are not reliable. At other times, though, the sonar is unable to detect a real target with just a single ping. Some objects, such as buoys, have naturally inconsistent reflectivities and will appear clearly at one ping and then turn into all but invisible "stealth" targets at the next ping due to only a slight change in orientation. Other objects may be obscured or hidden behind larger or louder targets as your vessel's perspective changes. In other cases, transient bubble clouds or fish schools may block some of the sonar’s transmitted energy.
Using expectational knowledge of these previously seen objects allows us to fill in those temporary blind spots, giving you more confidence that when you use a FarSounder, you’re seeing the whole picture of what’s in front of you. We call this new capability “gap filling”. In these cases, target tracking allows the sonar software to predict where that “missing” target should be and display a synthetic target in the predicted location. This is similar to persistence on radar systems. Synthetic targets are transparent relative to our confidence in them so that you have as much information as possible with a very natural feel. The video below demonstrates a situation where gap filling improves the situational awareness of the user.