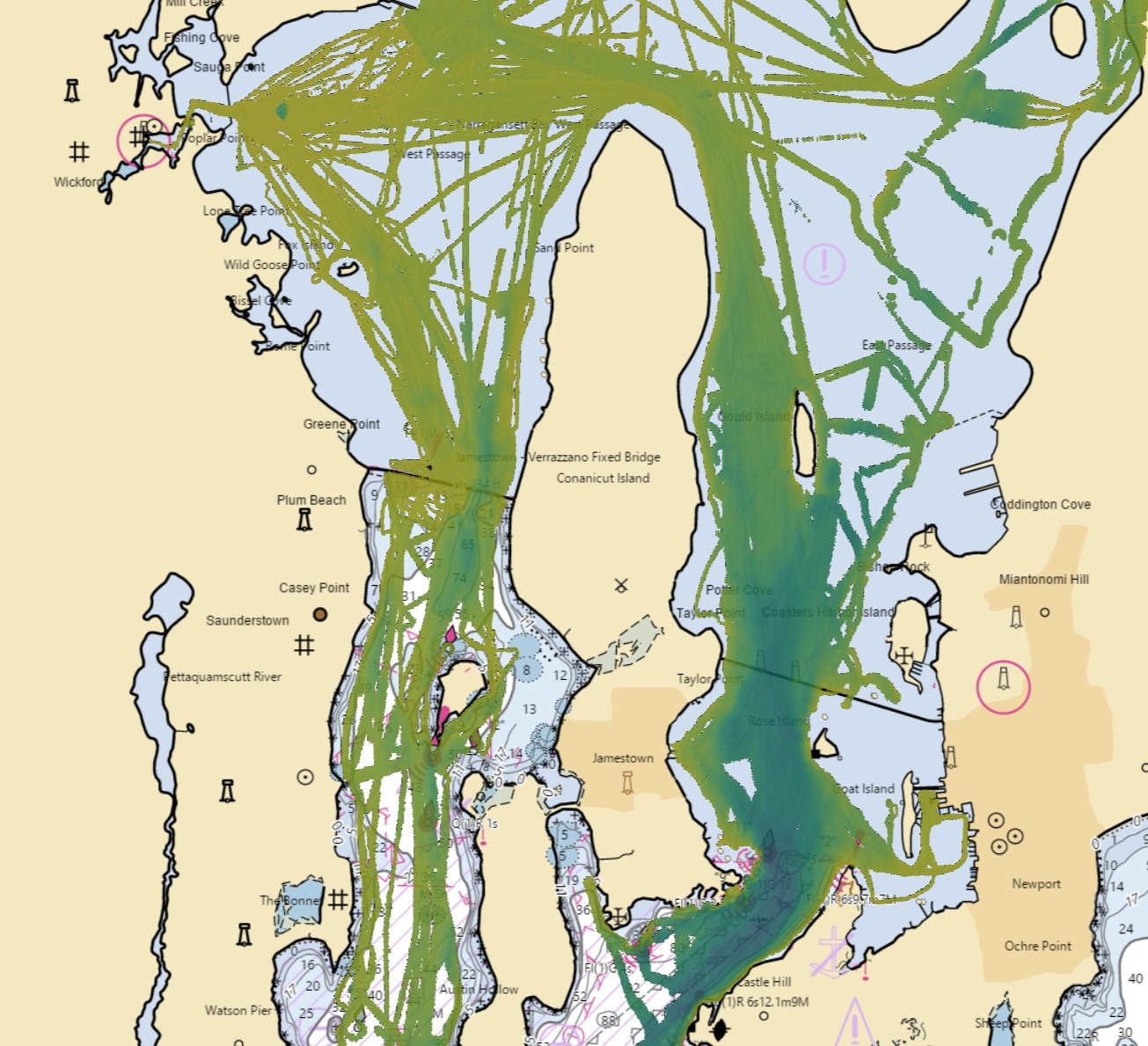
Heightened Awareness in Short Range Modes
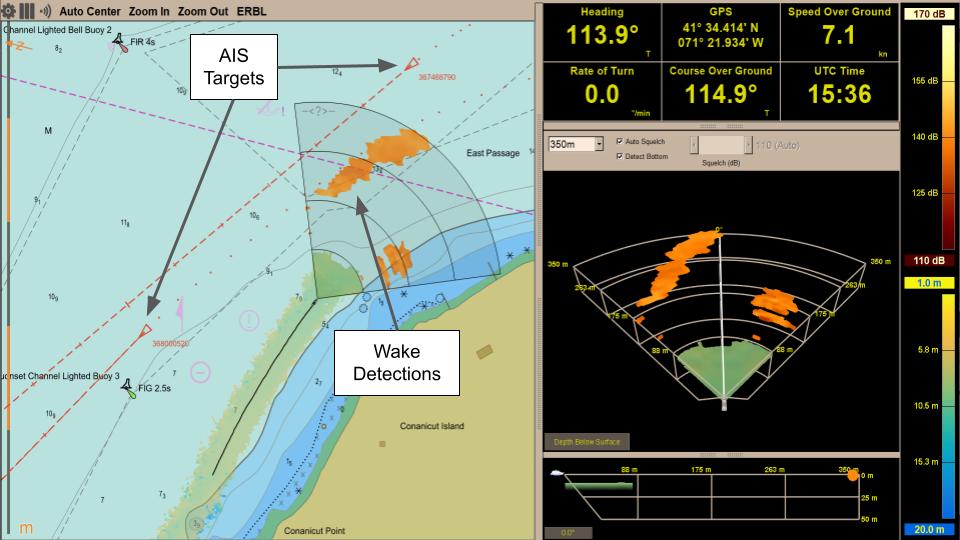
Figure 1 - Wide FOV
Did you know the Argos sonar systems offer dynamic fields of view? This gives the user different range options to choose from based on the marine environment and use case. In order to get the best sonar performance and most accurate detections, the operator is able to alter the mode accordingly. When transiting at significant speeds, operators will most likely want to use the longest range mode, giving them the most reaction time to any navigation hazards. While maneuvering through coral heads or looking for anchorage spots and traveling slower, users will many times prefer to be using a short range mode.
All Argos sonars include a highly sophisticated array of sensors, which listen for sound reflections in the water column. The software team regularly tests how far we can push these receivers to give the users the best possible experience. We have often found we are able to extract added value from our sonars through updating our proprietary sonar processing and viewing software, SonaSoft™. As of SonaSoft™ 3.10, the system will now ensure the best user experience by automatically adjusting the following based on range mode settings:
Field of View
Ping Rate
Transmit Signal
Field of View Update
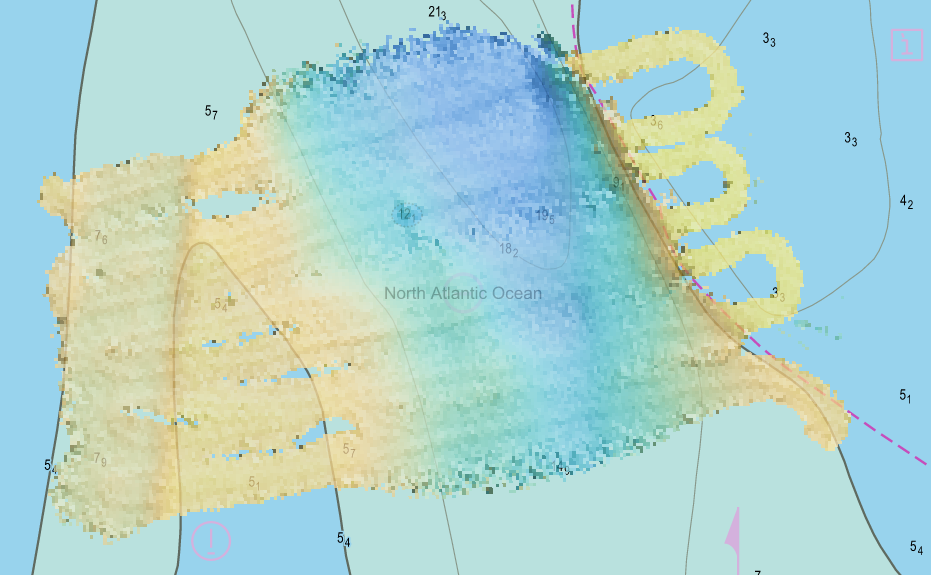
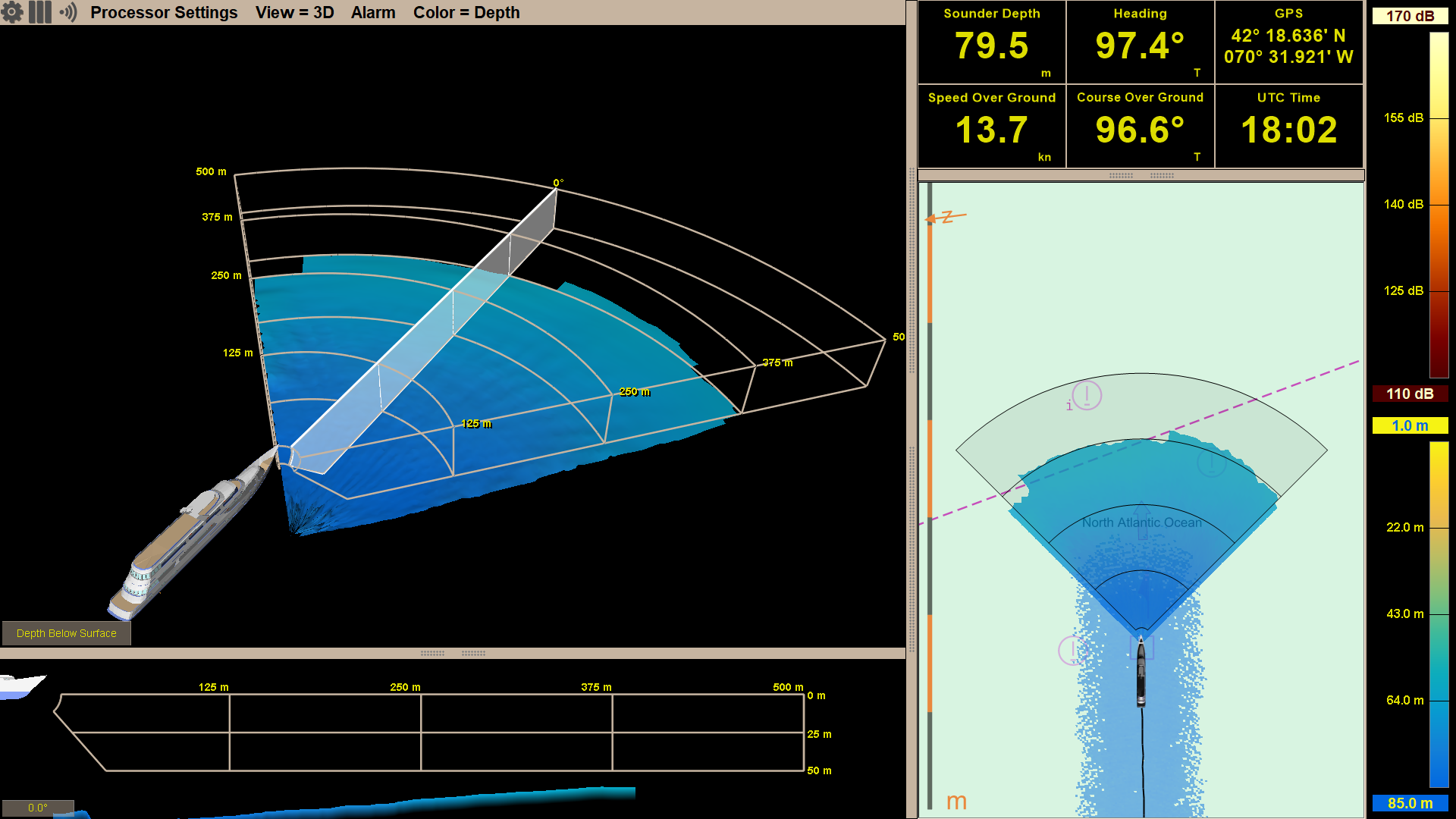
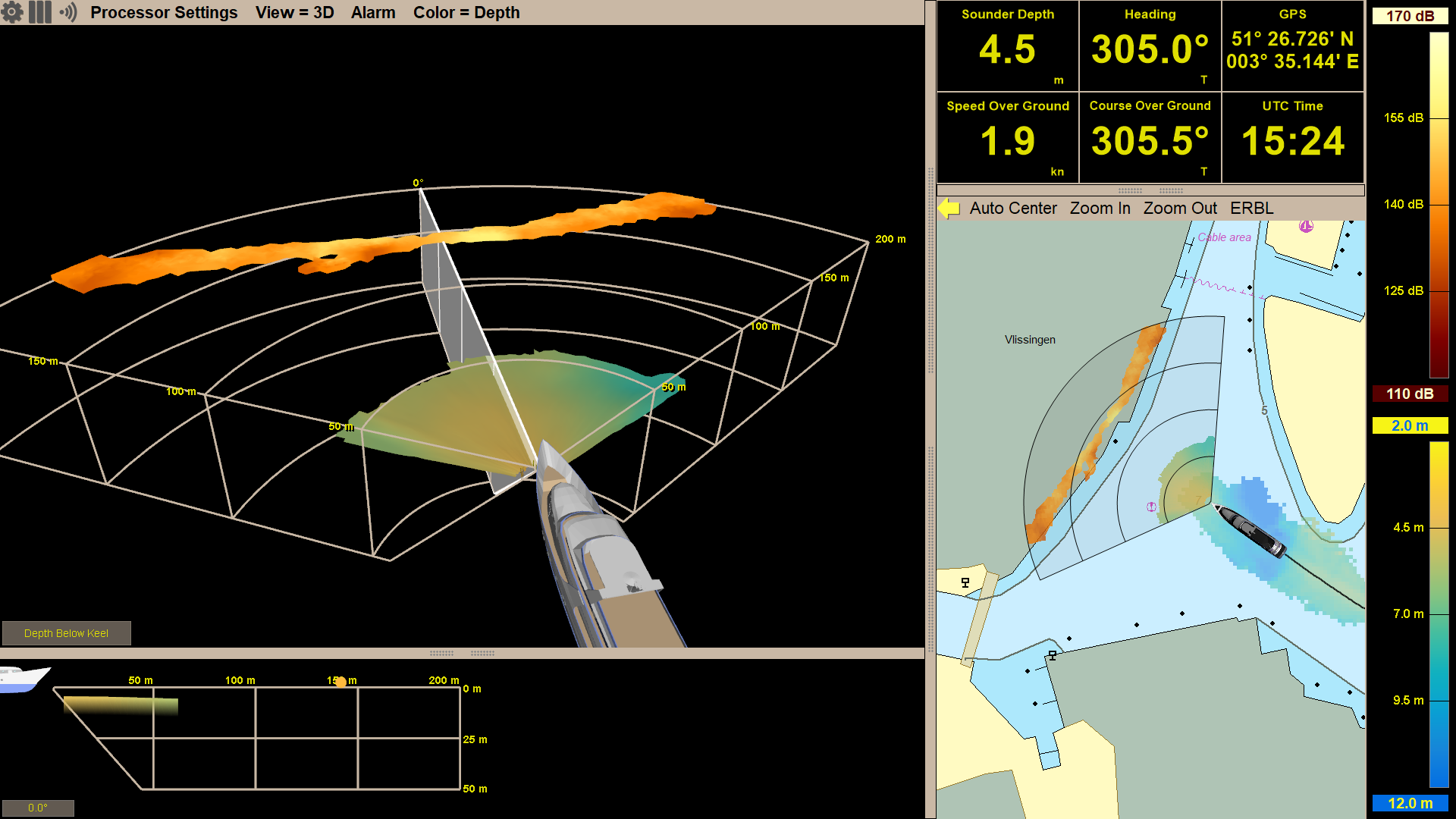
The Argos sonar series all update and process the entire selected field of view of the water column down to 50 meters (164 feet) below the sonar in a single ping. We do so through a process called beamforming, this will let us take the signal obtained by each of our receivers in the array and convert that information from the time domain to the spatial domain. Figure 2 shows an example of what this data looks like:

Figure 2 - Raw 3D Forward Looking Sonar Data
From this complicated data, our custom bottom and target detection algorithms automatically extract relevant information about what is ahead and below your vessel.
One concern when beamforming is maximizing main lobe levels and minimizing the impact from grating lobes which occur due to the spacing between elements on the array. This ensures the data is actually coming from that look angle and is not being aliased in from other angles. Figure 3 shows an example of our beamformer response while going through all of our horizontal look angles:

Figure 3 - Beamformer Angles Demonstration
You can see that there are no major grating lobes within our field of view. Therefore, we can be sure that when we combine all of the beams, grating lobes will not impact system performance.
Another consideration when increasing the field of view was identifying if there was enough transmit energy at the extents of the field of view to produce accurate detections. Our installation design protects the array face of the sonar by recessing the Transducer Module into a fairing. One concern was depending on the specific installation of the sonar, e.g. if it was recessed further, our transmit signal would be blocked at the extents of the field of view. To test for this, we ran a build through our hundreds of customer datasets of different installs and configurations and looked specifically to see if we had enough energy for consistent detections. We validated the design of our expanded field of view by processing through hundreds of customer supplied datasets in a variety of environments and covering a wide range of installation variations.
As with all of our enhancements and new features, the expanded field of view was also tested in the field under real world conditions by chartering a vessel from the University of Rhode Island before final release.
Our extensive testing process is how we confirmed we have low enough grating lobe levels and enough transmit energy in the short range modes to accurately detect targets and sea floors out to 120 degrees in short range modes. To use this on your Argos 500 or 1000 sonar, make sure you are running SonaSoft 3.10™ or greater and switch to 100m or 200m mode.
Ping Rate Update
One important metric when discussing the difference between sonars is the update rate, or how fast the entire 3D volume of the sonar’s field of view is updated. With all of the Argos sonars, we update the entire field of view in a single ping. This approach is unlike other sonars that take multiple pings to build a 3D image from a composite of multiple 2D pings. A fast update rate on the entire field of view allows users to very quickly recognize and assess navigational hazards. Certainly, it is best to transmit and receive as fast as possible. However, there are a few constraints that dictate how fast we can update.
The first and most obvious limitation is that sound takes time to travel through water. Sound propagates at roughly 1500m/s in water. Therefore, in order to reflect off of a target at 500 meters away and then be heard by the sonar it would take (2*500m)/1500m/s or 2/3rds of a second. It is two times the distance of the reflector because the sound needs travel to the reflector and back.

Figure 4 - Sound Propagation
There is nothing we can do to improve this as it is a physical limitation of sound propagating through water.
Another limiting factor is hardware limitations, the sonar takes time to transmit the ping, receive the data, and get ready for the next cycle. This is one place where we look to shave time off and push our current electronics. Finally an additional limitation is the processing speed. It does not matter how fast we can ping if we are unable to process the data coming in in a timely fashion.
With these limitations in mind, we looked to see if we could increase our current update rate. We accomplished this through trial and error of different update rates and extensive testing until a rate was stable with enough buffer room for possible slowdowns and complications was found. One concern of ours was overheating our electronics when in short range modes as the sonar would have less time to rest while waiting for the sound to propagate compared to the long range modes. We tested for this by submerging the sonar in warm water (replicating conditions in the hottest parts of the world) and pinging for an extended period of time. Through a few iterations of testing, we found that we were indeed able to increase the update rate in almost all of the modes.
Previously, the Argos 500 and Argos 1000 operated at a ping rate of about 3 seconds across all ranges. We found that we could ping much faster in shorter range modes without risk of overheating and now the ping rate is dependent on the range mode of the sonar. Now the ping rate at the shortest range is about 3 pings per second, at the longest range the ping rate is about once every 3 seconds, and scaled in between for intermediary ranges.
Transmit Signal
An additional way in which SonaSoft™ automatically adjusts to best handle different range modes is the transmit signal’s characteristics.
In shorter ranges, the ping is quieter and shorter. This is to prevent echos from close range targets, like sea floors at short ranges and shallow depths from saturating our receivers. This results in the highest quality bottom detections in shallow water. In longer range modes, the transmit signal is louder and longer to ensure we cover the field of view out to the full range extent. Some saturation will occur at near ranges, but in this mode, the user is more concerned with long range targets. We found these values by empirically testing many different transmit signals out in the field as well as extensive data analysis on the recorded data.
With the field of view increase, faster update rate, and specialized transmit signals, the Argos 500 and Argos 1000 sonars received a big performance boost in short range modes. So the next time you are nosing around in a harbor or navigating through a reef, give the short range mode a try!