Eyes in the Back of Your Head - Introducing Dual Navigation Sonar
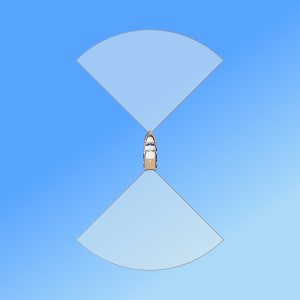
FarSounder's dual navigation sonar solution with bow and stern installations.
Forward looking sonars significantly add to a ship's situational awareness when moving forward. But what about when the vessel is moving astern? With more and more yachts, workboats, expedition class passenger vessels, and arctic explorers being outfit with azimuth thrusters and advanced DP, larger vessels are finding their way into tight places with a need to back up. If you need an obstacle avoidance sonar to make your way in, sometimes you need one to make your way out - especially with the reduced situational awareness of the bridge facing forward and the vessel running astern.
FarSounder’s Solution

The user can switch between the bow and stern sonars with a simple toggle.
In addition to our traditional look-ahead sonars, FarSounder now offers look-astern sonars. The stern mounted sonars are based on the same hardware as our forward looking sonars. For vessels with both bow and stern mounted systems, the two hardware systems are controlled from one integrated software package running on the bridge computer.
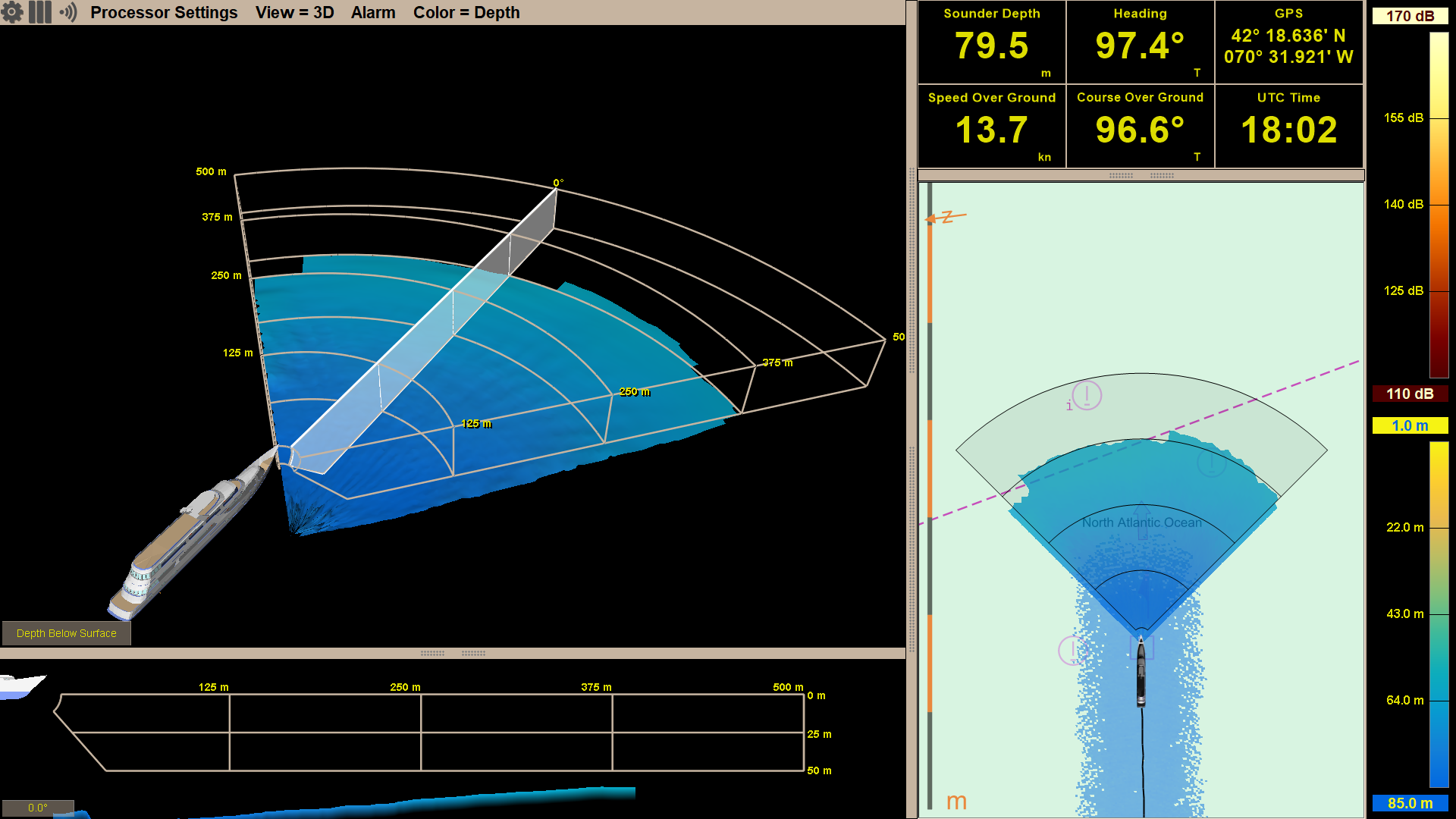
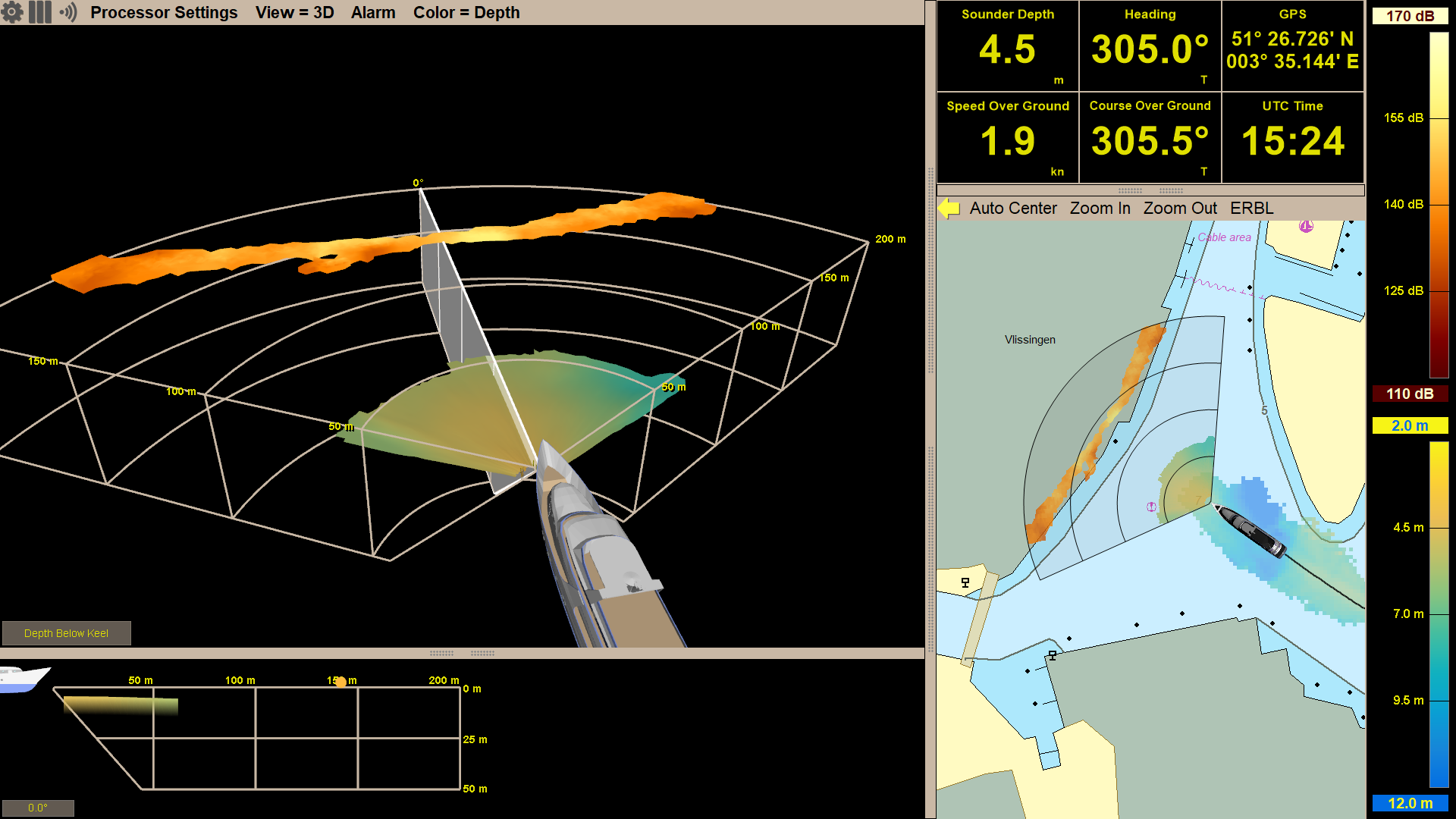
When navigating with the bow sonar, the software’s looks like our standard navigation system. When navigating astern, the 3D sonar and chart overlay displays change the vessel’s orientation.
System Architecture
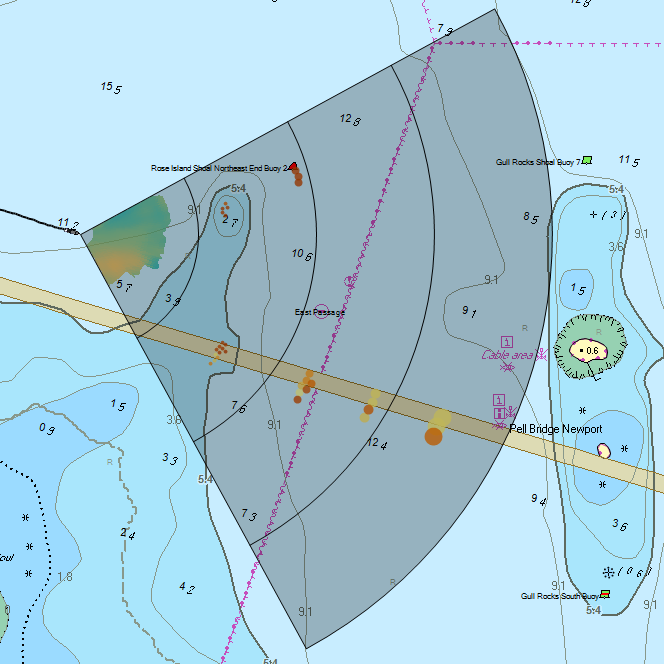
If the user selects the bow sonar, the software looks very similar to our standard navigation software; except the label "BOW" is added to the 3D display's configuration indicator overlay.
The standard bow/stern solution includes: bow Transducer Module, bow Power Module, stern Transducer Module, stern Power Module, and a single bridge computer. Our standard Sonar Cable connects each Transducer Module to its respective Power Module and standard ethernet connects each Power Module to the bridge computer. The two Transducer Modules are configured at different IP addresses but operate on the same network.
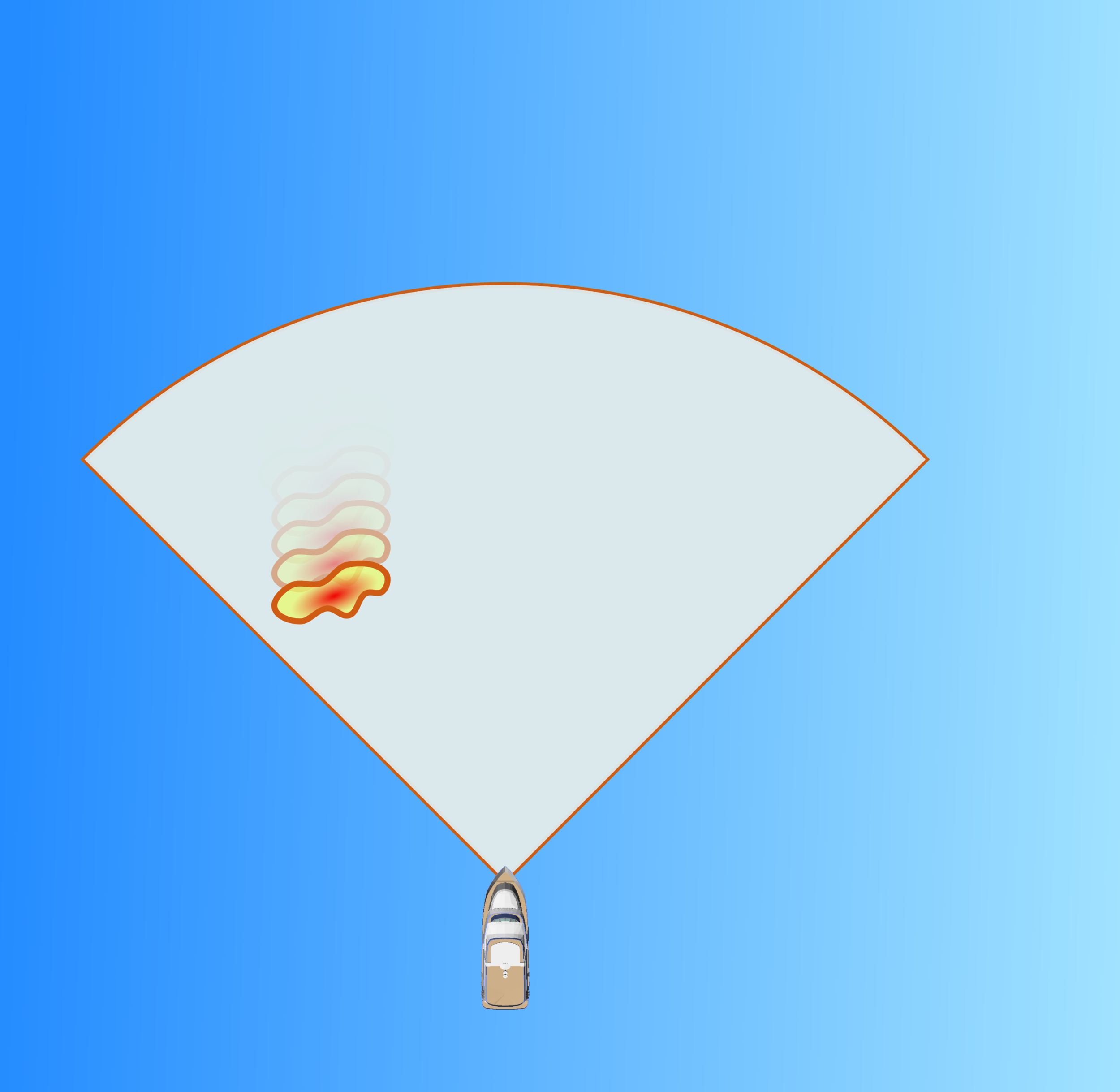
When using the stern sonar, the 3D Sonar View is labelled "STERN". Note also that the vessel icons are turned around. The sonar field-of-view is now emanating from the stern.
Data from the ship’s navigation sensors (GPS, gyro, etc.) are connected to the bridge computer. The software uses these inputs for both display and ping-to-ping processing purposes. The software on the bridge computer is also configured with vessel beam and length, GPS antenna locations, and Transducer Module locations. This information enables the software to properly orient the sonar data relative the bow and stern of the ship including cross ship offsets (in the case of catamaran/trimaran hulls or installations where either Transducer Module is installed offset from the centerline).
This solution is compatible with all models of the Argos hardware. It is even possible to install different models in the bow and the stern.
Considerations when Planning for a Stern Sonar
The standard installation method for FarSounder sonars consists of a fixed fairing integrated into the hull. The fairing is essentially a tube with an internal flange suitable for mounting the Transducer Module with no moving parts. Similar to our forward facing sonars, the Transducer Module can be easily installed and removed by a diver.
When choosing a location for the stern sonar's faring there are a few things to keep in mind:
The Transducer Module must be installed in a location where its field of view won’t be blocked by stern thrusters, Azipods or propellers.
The location should be clear of turbulence generated by the propulsion system when the vessel is moving astern.
If the stern sonar will be out of the water when the vessel is moving ahead (as is the case on some high speed vessels), the sonar should be integrated into the vessel’s automation system to automatically power down the stern unit once the vessel reaches a given forward speed.
FarSounder's Dual Navigation sonar system can be a significant contributor to a vessel's situational awareness, improving the ship’s safety when navigating forward and astern. Dual Navigation capabilities can be added to existing forward looking installations as well as ships that do not yet have any navigation sonar system. Contact info@farsounder.com to discuss your particular installation and integration requirements.