
Tech Blog
Search our Tech Blog:
Deep Learning in Shallow Water
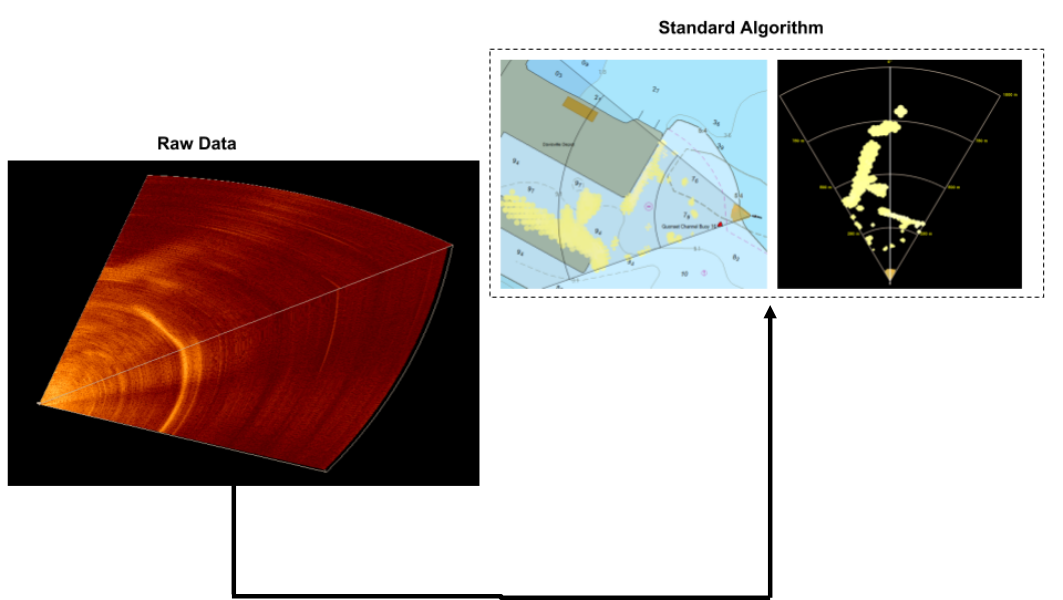
Convolutional neural network (CNN) models have grown in popularity in recent years by demonstrating impressive performance in many fields. These models have been applied to complex problems in many domains. Given the added performance and flexibility offered by these models, we had to ask: “Can we incorporate a CNN based model into our current processing algorithm?”

Applications of Today’s 3D Forward Looking Sonar (OCEANS17)
Abstract: Currently, the main application of commercially available three-dimensional forward looking sonar (3D FLS) technology is for real-time vessel navigation. Using 3D FLS technology, the vessel operator can detect not only the range and bearing to a navigational hazard, but also the depth of the hazard in the water column. However, 3D FLS is itself a nascent technology for which many exciting applications are yet to be realized. In this work, the current applications of 3D FLS are surveyed, and some useful metrics for the evaluation of a 3D FLS are defined. New possible applications of 3D FLS are introduced. Performance for all known commercially available 3D FLS products according the FLS metrics previously defined is summarized. Finally, some of the differences in applicability for current and emerging applications of the most robust 3D FLS systems are discussed.
Performance of 3D Forward Looking Sonar for Bathymetric Survey (OCEANS17)
Abstract: Over the past 13 years, the use of 3-dimensionalforward-looking sonar (3D FLS) for real-time navigation has been adopted globally by a growing number of vessel operators. More recently, FarSounder started collecting bathymetric data using 3D FLS sonars in Forward Looking Multi-beam (FLMB) mode. Before exploring all of the possible applications of collecting bathymetric data on vessels with an installed 3D FLS navigation system, the accuracy and limitations of this data should first be understood. In this paper, results from two small surveys using a FarSounder 3D FLS in FLMB mode are presented and analyzed. The survey depths are corrected for tide height and compared to NOAA survey data. The average absolute error in depth is found to be 6.6 and 2.2% in the Patience Island and Newport Bridge survey area, respectively. Further, the average survey swath width is computed from the data recorded as ~9 water depths at ~6 knots.
Vector Data Extraction from Forward-Looking Sonar Imagery for Hydrographic Survey and Hazard to Navigation Detection
Abstract - This paper describes research to determine the effectiveness of forward-looking sonar as a means to safely navigate vessels in frontiers such as the Arctic and other regions that may be lacking recent or comprehensive hydrographic survey. Key elements of this investigation include the range at which valid measurements may be taken, uncertainty in measurement, confidence level of the measured value and resolution available to detect underwater hazards affixed to the bottom and suspended within the water column to provide time sufficient to enable the crew to take action to alter course and/or speed to avoid casualty. An additional factor involves examining forward-looking sonar measurements as a means to survey shallow sea bottom where hydrography data does not exist or is not accurate, potentially offering a valuable resource to supplement scarce national hydrographic office assets to accomplish this task. An assessment of viability is also made regarding compliance with the International Hydrographic Organization (IHO) standards for hydrographic surveys that form the basis for soundings that appear on navigation charts.